最近のロボット制御はROSを抜きにしては語れなくなってきています。
成長の過程にあるROSを使った画像処理ロボットを勉強していきましょう。
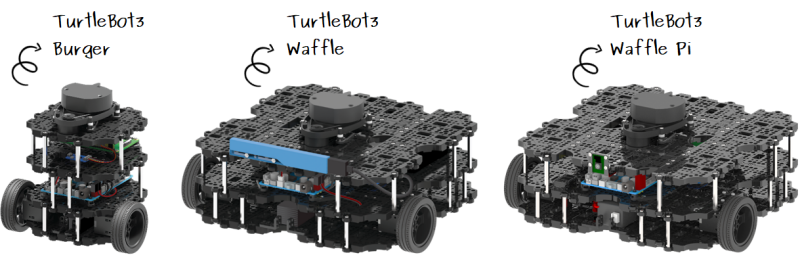
ベース教材は、下記のROS教育ロボット<Turtlebot3>を使った資料を参考に他のロボットへの展開を考えます。
購入ロボットは、下記の中の一番小型の「Burger」です。
http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
<リモートPCのセットアップ>
最初にロボットを制御するPC(リモートPC)に各種Softをインストールします。

1.Linux(Ubuntu)、ROS、Turtlebot3用アプリケーションソフトをインストールします。
<リモートPCに、Linux:Ubuntu18.04LTS をインストール>
リモートPCはWindows10でも使うことが出来るようになってきましたが,今回は無難な Linux PCとして使用します
Ubuntuダウンロードサイトから「Ubuntu18.04LTS」をダウンロードしてください。
ダウンロード、インストールは一般的なので説明は省略します。
<ROSをリモートPCにインストールする>